
This came up in a discussion the other day. I figured that I’d bring it up here as it is current in what I’ve done in a recent design.
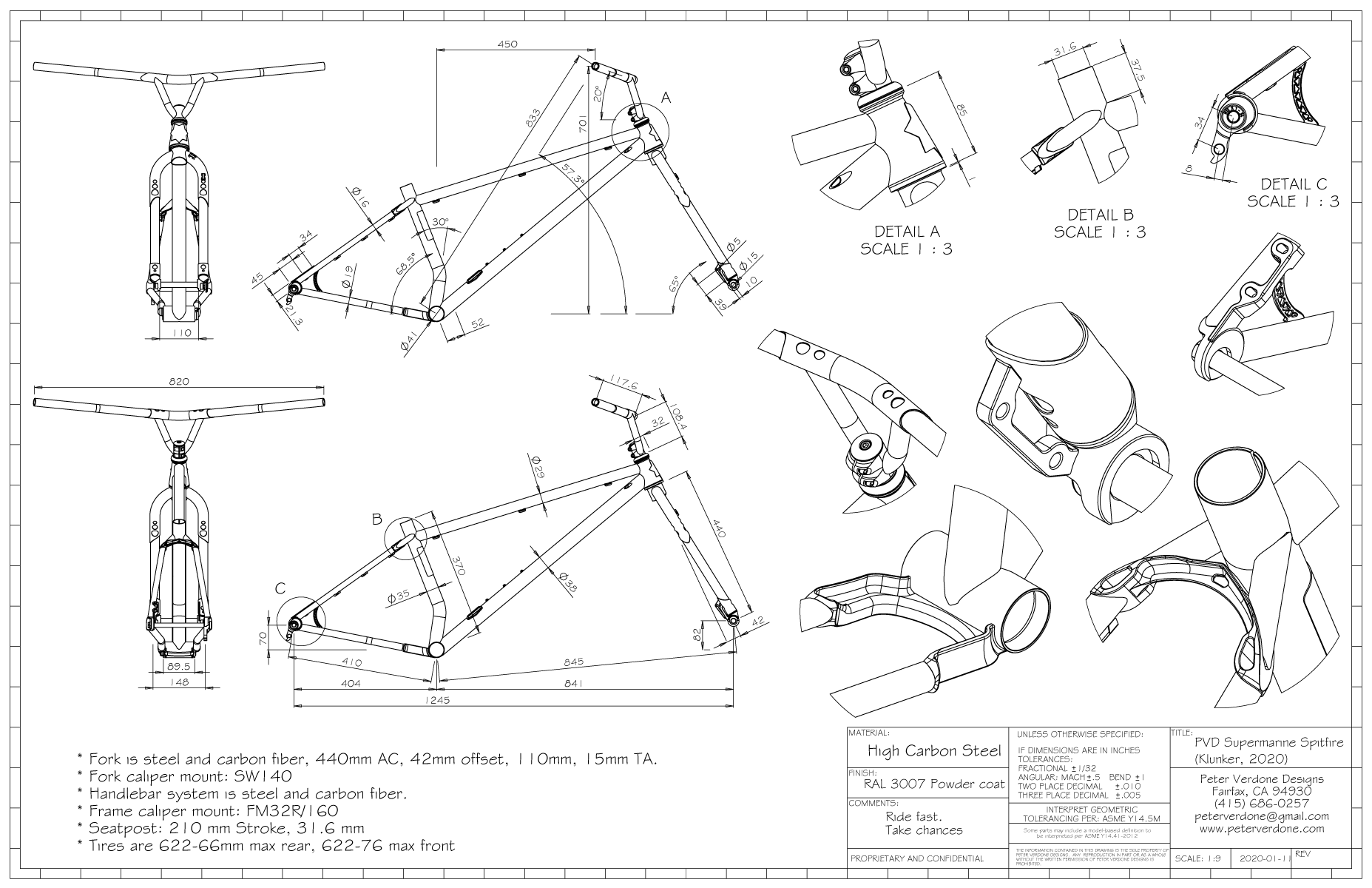
I’ve been working with my klunker platform enthusiastically and have just produced the Supermarine Spitfire which was building on the Sopwith Camel. It makes use of my new handlebar system to help add almost 50mm to the length of the front center but also several important improvements were made and one gremlin was getting sorted out.
The Camel, and the Baron before it, had steering that was a bit odd at very low speeds and especially on pavement. Not really bad in the dirt but noticeable in the parking lot. Increasing the size of the front tire to 774mm (622-74) for cushioning and traction took its toll on the steering geometry. It was just too floppy. I needed to do something.
I went from (Sopwith Camel) 50mm offset and 64 degree head angle to (Spitfire) 42mm offset and 65 degree head angle. Trail is 1.7% longer but wheel flop is reduced 2.1%. It doesn’t seem like much but the front end feel is dramatically improved, like, amazing now. I’m really stoked on it now. It was an interesting gamble but it really paid off in sorting out this gremlin..
Another factor that had been changed between the two bikes is the weight distribution over the wheels when going from the Camel to the Spitfire. The Camel had a BB distribution of 403/795 (33.6%/66.4%) while the Spitfire had 404/841 (32.4%/67.6%). That’s a 1.8% change reducing the weight over the front assuming identical body position. As explained further below, where the weight is on the bike has a real difference on front end geometry choices.
The low head angle had been a compromise in earlier designs. I was trying to get the front wheel as far ahead of the bike as I could and still use the old school handlebars. On the Spitfire, that compromise was no longer needed. I would suggest that most bikes outside of serious ‘go fast downhill’ bikes not go below 65 degrees of head angle as more is being taken from the bike than given.
Assuming a 774mm wheel diameter, mechanical trail grew from 119.6mm to 121.6mm but flop height reduced from 52.5 to 51.4mm.
MT = (WR*cos(HA)-O)
FH = (WR*cos(HA)-O)*cos(HA)
MT = Mechanical Trail
FH = ‘Flop’ Height
WR = Wheel Radius
HA = Head Angle
O = Offset
So what is happening when we change the ‘flop’ height. This is a little tricky. The head axis is rocking over the contact patch using the mechanical trail lever. The arc of this rock is around the edge of the cone of a radius described by the ‘flop’ height. When we reduce the flop height, the radius of that cone gets smaller and visa versa. Any angular change in the wheel will lower the center of mass of the system (component that is over the front end) below the maximum height of that cone. That subtracts from the potential that the mass has. The greater the radius of this cone, the greater the potential that is given up for a given change in wheel direction. To bring the wheel back to zero, potential needs to be added back into the system. Often, the castor effect is sufficient to do that, but these are situations where the leverage of the castor and the speed of the system work out. If the ‘flop height’ is high and the mechanical trail too short at too low of a speed for the potential need to recover, additional energy will need to be added to the system at the handlebars.
The size and way a tire works and the terrain that the bicycle is on have a huge effect on how all of this works making it hard to define rules that extend across the board forcing testing when significant changes are made. The Sopwith Camel felt fine when riding on trail. On pavement the story was different. It felt bad. At very slow speeds in the dirt, there was a gremlin that was present. That’s what I was being magnified on the pavement. That’s not that big of a deal for a true dirt bike but it is something that points to issues. The small changes made on the Supermarine Spitfire eliminated any issue on pavement and low dirt speeds. That’s just the refinement that we get as we dial in parameters in design.
![]()