I’ve been working on my suspension bike design for about five months now. There’s no rush and I’m trying to do it right. I can prototype as much as I like in the computer and it doesn’t cost me a thing. What’s expensive is wasting money or time once I start cutting metal. I’m nearing the end of the process and there was just one last thing to nail down.
I’ve had to learn an incredible amount of things that, while I may have casually understood earlier, I had to learn them now for real. So it’s done right. Given the arrangement that I’m using in my design, I couldn’t rely on traditional calculations for anti-squat. I knew that I was in the right range but I had to fully understand the issue before I could bet all on black.
There’s plenty to read on the subject of anti-squat. It’s extremely important in motor vehicles– cars, trucks and motorcycles. The power and speed of these machines make each of the components of the system serious issues. Thus, there’s been plenty of real engineering work done to describe, calculate, and produce geometries that work for a given situation. I don’t need to reproduce that level of engineering explanation here in this post.
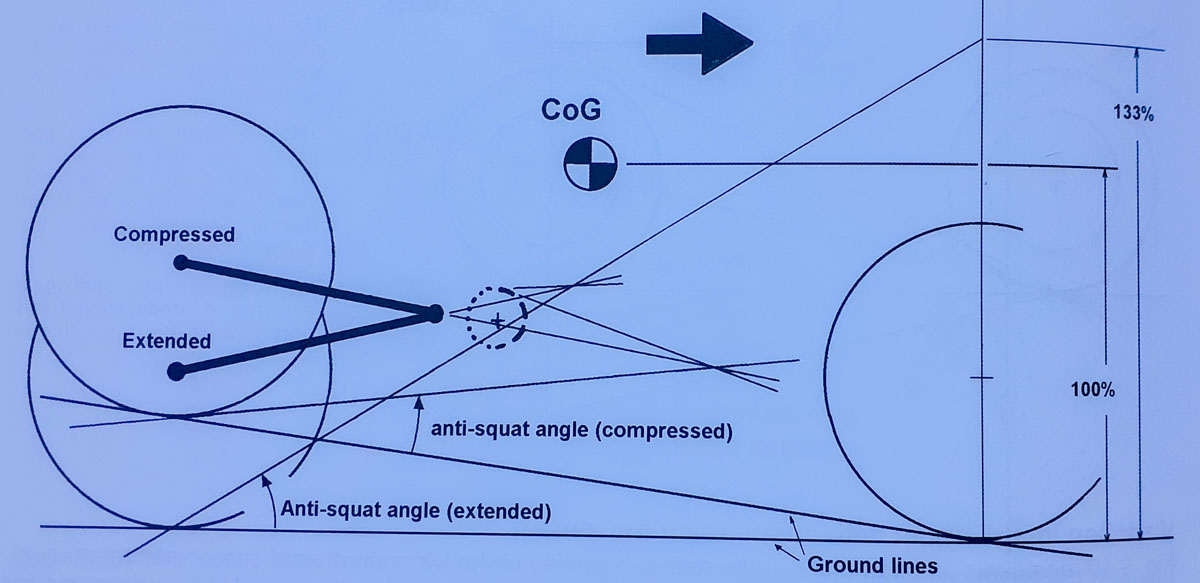
Knowing what we are trying to accomplish with anti-squat, we come up with some values. Typically, a percentage will be used to express the ability of the anti-squat forces produced in the driveline to lift the rear of the vehicle against the load shift applied to it under acceleration. At 100%, the system should be in equilibrium, under 100% and the system is squatting, over 100% and the system is jacking. Also, traction issues can result if the percentage is too great.
On a bicycle, we have different issues than in the autos, with regard to anti-squat. One is the bob that is produced when the rider is pedaling to accelerate. A smoother spin will help some but bob will still show up. Because of this downward jabbing motion when a power spike is applied, we want a bit more anti-squat force at that instant so that the bicycle isn’t bouncing up and down instead of tracking and thrusting. The bicycle is also a system where the rider mass dwarfs that of the machine, unlike in the auto.
This is all pretty well known stuff. Everything should be fine with all this to this point and I’m sure all of the internet experts are nodding their heads and saying “Tell me something that I don’t know!” Ok. I will.
When we are designing a suspension bike, many of us will use a piece of software: Linkage X3. It is far from faultless, but it makes rough sketching and calculations easy to get a design into the ballpark before we go into a real modeling package to get it dialed. It’s horrible for describing the geometry of the bicycle outside of the fundamental suspension system. It does odd things at times and you need to keep your eye on it, things will mysteriously change.
So, I’m trying to resolve the anti-squat in my design. There’s a nice graph showing the percent anti-squat for the chosen gearing through the suspension travel. We need different amounts of anti-squat in each gear and at different points in the travel. Ignoring other factors, we don’t need to worry much about anti-squat deep into the travel as we aren’t producing power when the system is that loaded. Then we look at other conditions and gearing and where we are in the travel. We don’t want so much anti-squat that will jack up the bike as we are seated or standing climbing a steep hill in very low gears. There are choices to make.

So, we look at the graph. We make changes. We stare at it. We get a great idea! Compare to another design! We look at other graphs. Some are online in the various suspension reviews. Some others are found in the Linkage X3 online library. That is when the problem starts.
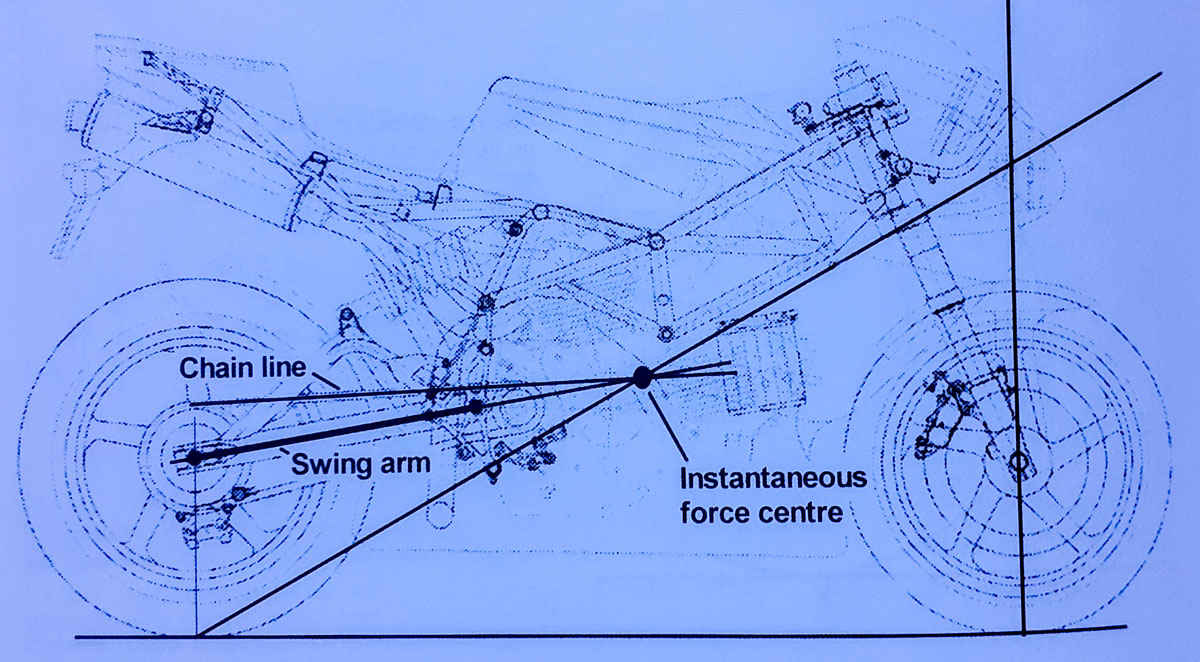
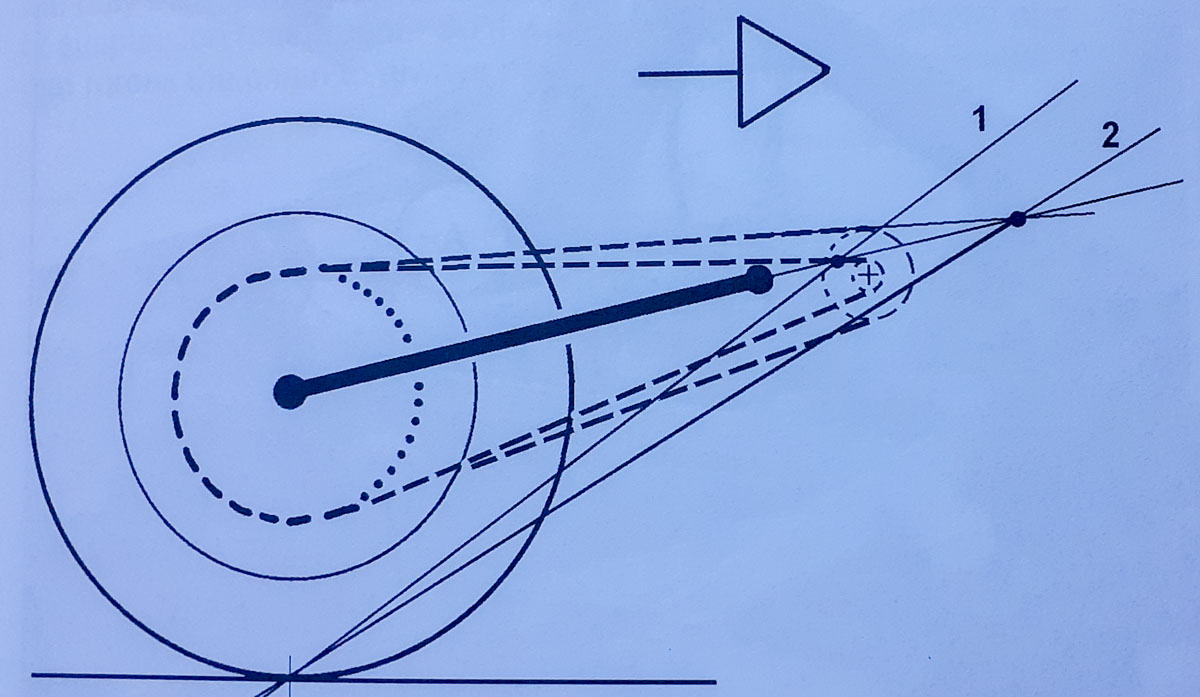
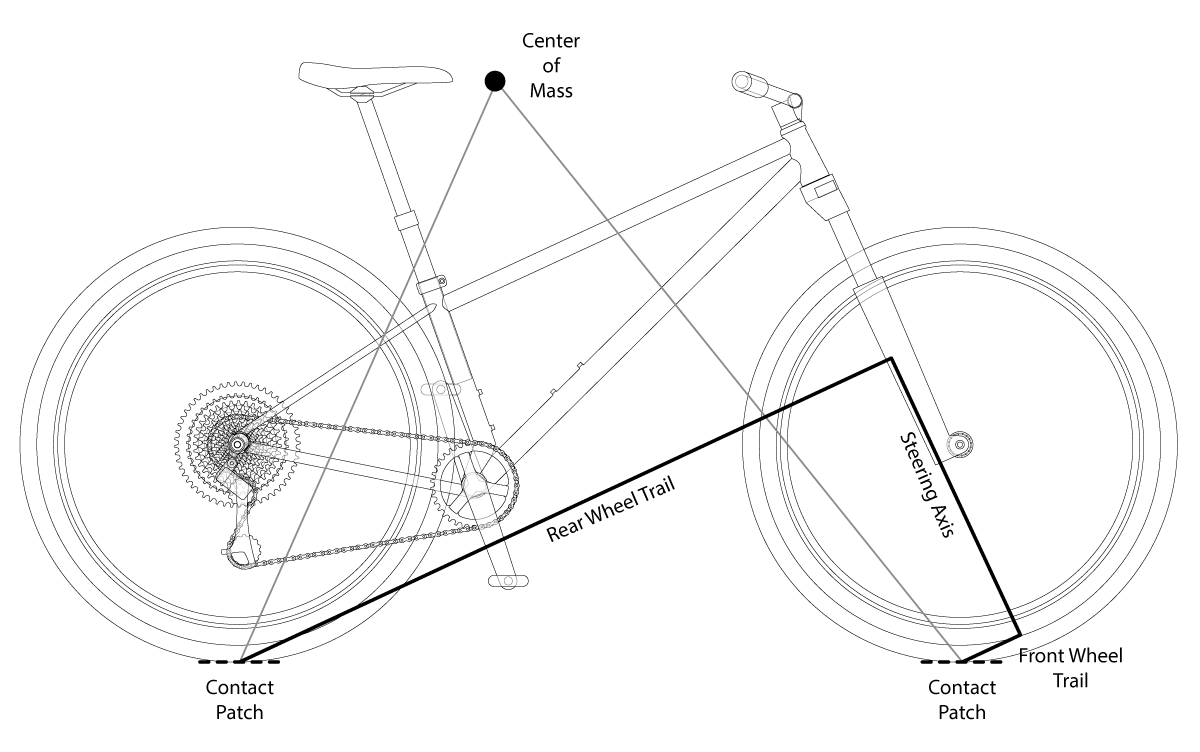
When we look at these charts, we are comparing the calculation for the anti-squat, as a percent. That percentage is arrived at by putting the height of the center of mass (COM) to the height of the intersection of the line formed by the line passing from the rear contact patch through the intersection of the swingarm line and the chain tension line (instantaneous force center) to the height it intersects a vertical line above the front contact patch. Sounds good?! Good.
No. We can’t compare like this.
Here is the problem. The placement of the COM is completely arbitrary in a bicycle design and so are the reporting of its properties, even if the bike were to be designed for one specific rider.
In automobile racing, for calculations of COM, the mass of the driver is a negligible parameter. A change from a 140 pound driver to a 250 pound driver will change COM of the system only slightly. If the driver is leaning forward or rearward it will be almost imperceptible to the system. So we can use a COM that works for most drivers and get good settings for the anti-squat.
In motorcycle racing, the rider is a lot more dynamic over the bike than in the auto. On a sport bike the rider will move a bit but mostly to move the mass to the side. The bike has incredible power as well as incredible traction. On a dirtbike, the rider is more dynamic over the bike but the power output for the traction available is insane and wheel spin is even more a part of the handling than it is on the sportbike. On both, the motorcycle has an extremely narrow range of gearing to be designed around and the rider is still only half or a third the weight of the bike.
The confusion around what we know about the anti-squat percentage is added to by the relationship of the vertical line going through the front contact patch. The front contact patch will change as the front wheel moves through it’s travel even while the forces going through the rear contact patch may not. Also, different size bicycles will have different front center lengths, shifting everything.
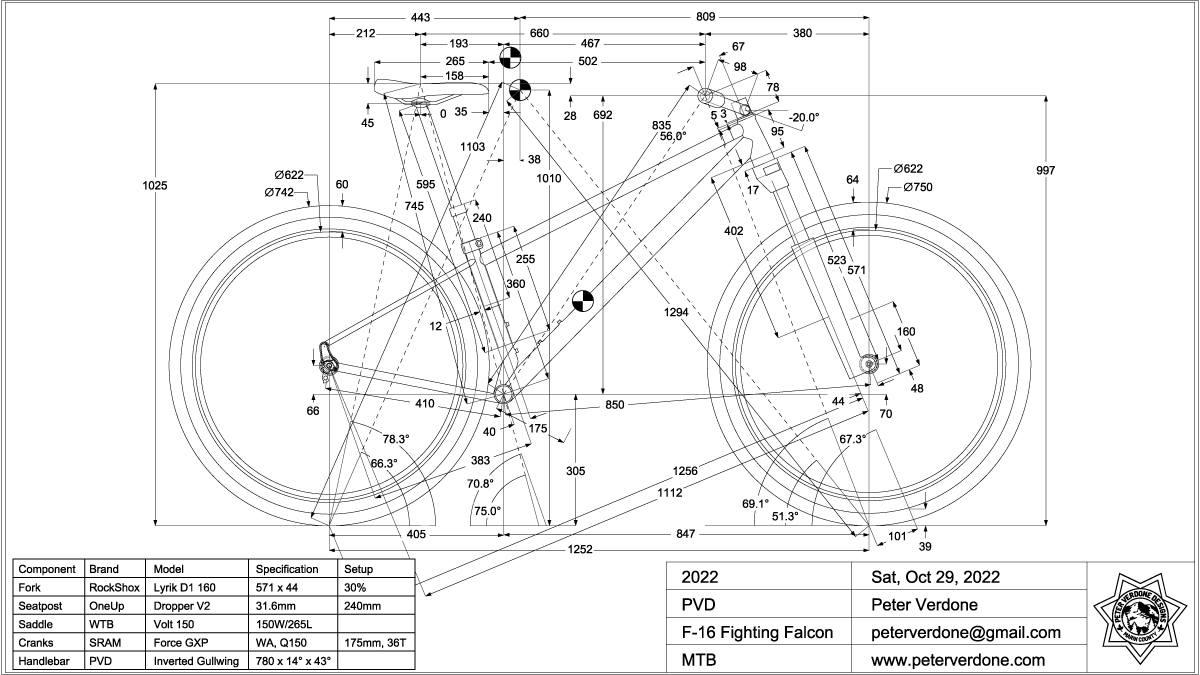
There’s also the problem of measuring the COG. It’s a pain in the butt and most people that I’ve talked to haven’t actually done these measurements. I’ve measured mine at about 43mm forward and 850mm above the crank axis.
I opted to make the measurement of COG with my PVD Supermarine Spitfire. Its geometry is more advanced than most bikes so it will produce useful measures and without any suspension travel I could get a little more accuracy in my vertical component. During the measurement I attempted to keep the same body position relative to the bike and I tried to have most of my weight on my pedals, with my butt just floating over the high saddle. I did 4 measures, on level, 7.1° front and rear raised, 20.6° front and rear raised. I measured the bike without a rider to confirm the math and the measuring without having to deal with a wobbly rider on the bike. Tiny shifts of the body will change the measurement and product considerably. This is far from an easy measurement to make.
Most folks have a problem doing this math.
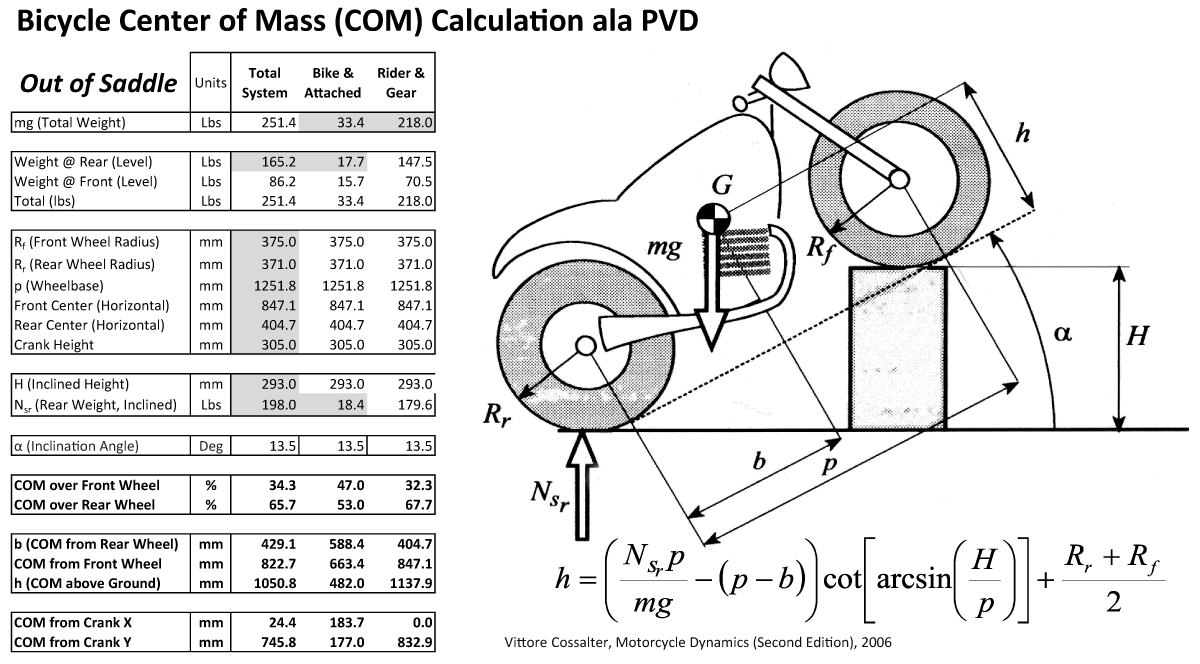
You can see that even though I was really trying to keep in the same position over the bike, a range of numbers was produced: 854, 856, 811, and 801mm from the crank axis. This is certainly due to my efforts to balance on the bike, what feels ‘wrong’ in this context, and the coarseness of the setup. The COM is about 43mm ahead of the cranks.
It looked like I needed scales with much finer resolution to get good numbers. The motorsport scales that I was initially using was far too coarse at 0.5 lbs. I ordered some cheap scales off Amazon that have a much greater level of precision in the bicycle range. Certainly, 0.05 lb. increments did help. That’s 10x greater and it’s still problematic. A real lab setting would make a difference here also.


Browsing files on Linkage, I’ve seen other files with COG of (13,608), (-9,598), (-5,600), (-10,600), (-12,598), (-4, 600), (-13, 1123), and it goes on, into the theater of the absurd. Clearly, the general concept of COG is entirely imagined for most people who are sharing files. I worry others aren’t doing this measurement IRL. Worse, I’m going to assume that many are gaming the calculation by moving the mass distribution in the calculation to produce percentages that are in accordance to their expectations.
These low (height) reported COG numbers being used in the calculations will produce anti-squat percentages much higher than they really would be if a ‘normal’ rider were on the bike. This is a classic “shit in/shit out” situation. I’m 5’10”, a little on the heavy side but with a riding position a little lower than most, which pushes my COG maybe a little higher than average (my measured COG range was 800-860mm). I can only imagine that would be 775-875mm for the overwhelming majority of ‘average riders’. If folks are using 600mm as a height, everything is going to be way off.
Why is all of this important outside of the choices of the designer? Why does this matter to the rider? I’ll use an example.
Locally, I know two professional enduro racers that are at opposite ends of the spectrum. Ian Massey and Ryan Gardner. Both are incredible riders that are capable of getting up a hill super fast and getting down it even faster. Ryan is 6’3″ & 200lbs. Ian is 5’7″ & 140lbs. They both ride with completely different styles. Statically, their COM is at very different heights and probably also for/aft. Dynamically, because of their different techniques. their COM is moving around in a very different way. Ian is super precise and studied in form. Ryan is the bull in a china shop, that’s not bad. It’s just a whole different thing.
Relying on a reported percentage anti-squat plot for a given bike is a big problem as the individual rider’s mass, style, and size are not factored and therefore the percentage would not hold true for different riders. We don’t know if Ian or Ryan are going to be getting on the arrangement. If we use the anti-squat angle instead, this holds true for all riders that get on the bike, but produces a different feel for each. Isn’t that exactly what we want? Knowledge? If I know the anti-squat angle of one bike is 35 degrees at sag and another has 45 degrees at sag, then Ian can know that the 35 degree bike may be better for him and Ryan can know the 45 degree bike may be better for him. Bikes aren’t widgets. They do not have universal value. They need to fit the rider, their goals, and the use.
Obviously, economics dictate that you would use the same kinematic arrangement for a full size run (I guess; out of my league here). In a perfect world, we’d change it for each rider but that is outside of the point of this article.
If the tuner needs to know more about the finer points of a particular rider on a particular bike, s/he can measure the COG in fact and calculate the percentages from the anti-squat angle and the front contact patch location. This is meaningful and useful. Telling the tuner a percentage is truly useless. With anti-squat angle, I can more easily compare one design to another. I can’t do that with percent anti-squat as I don’t know the assumptions and can’t undo them.
We need to be talking about anti-squat angle.
I’ve been doing some fine tuning and have the angle of about 40.8 degrees at 30% sag in most gears. So I ask, what is the anti-squat angle of your bicycle design at 30% sag and in what gear?
Credit: Most of the images here were used without permission from Tony Foale‘s incredible book, Motorcycle Handling and Chassis Design: The Art and Science. This book is mandatory reading for any person interested in bicycle design.