I’m doing a bit of R&D for a possible eCruiser project. I’m an old man now so sportbikes aren’t my goal and dirt bikes will have to wait until I move from the bay area.
The last bike I was riding, a 2014 Honda CTX700, was an awesome stem to the old man world of motorcycles. A relaxed upright but low position, swept back bars and small forward floorboards. It was so comfortable. More the DCT and ABS were a joy. Sadly, that got totaled in a crash at the Golden Gate Bridge toll plaza when I was cut off by a crazy driver. I’ve been off the motorcycle for a while and really need to get back. Buying a beater Shadow makes sense. Making something is more exciting.
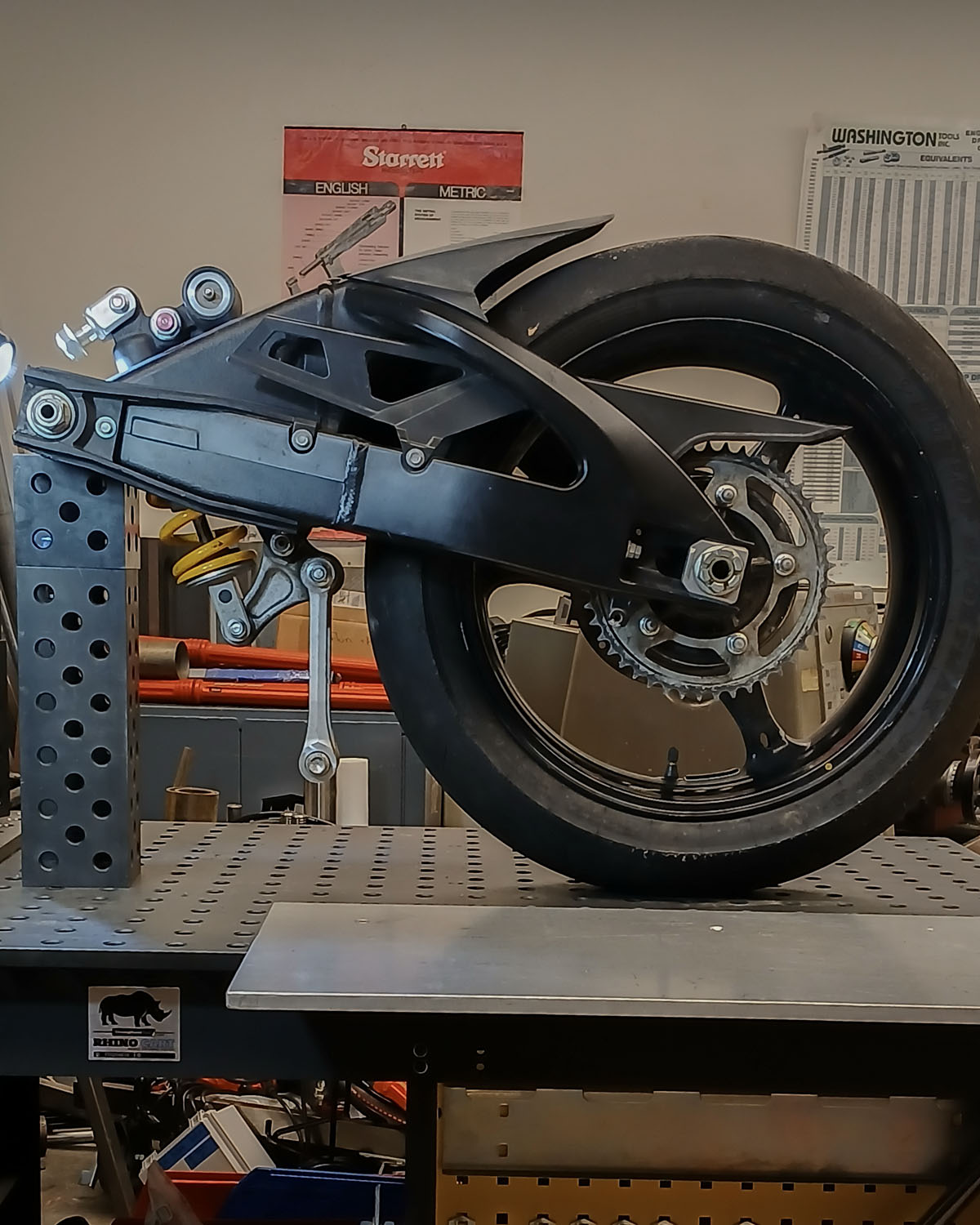
This is helped in that I have a K8 GSX-R1000 front and rear end that I can use. This is leftover from a 20 year old zombie project. I had to dig around in the garage but I managed to find all the parts. The parts are so nice there’s little reason to use anything else. I just need to optimize them for this use.
This post focuses on the rear end.
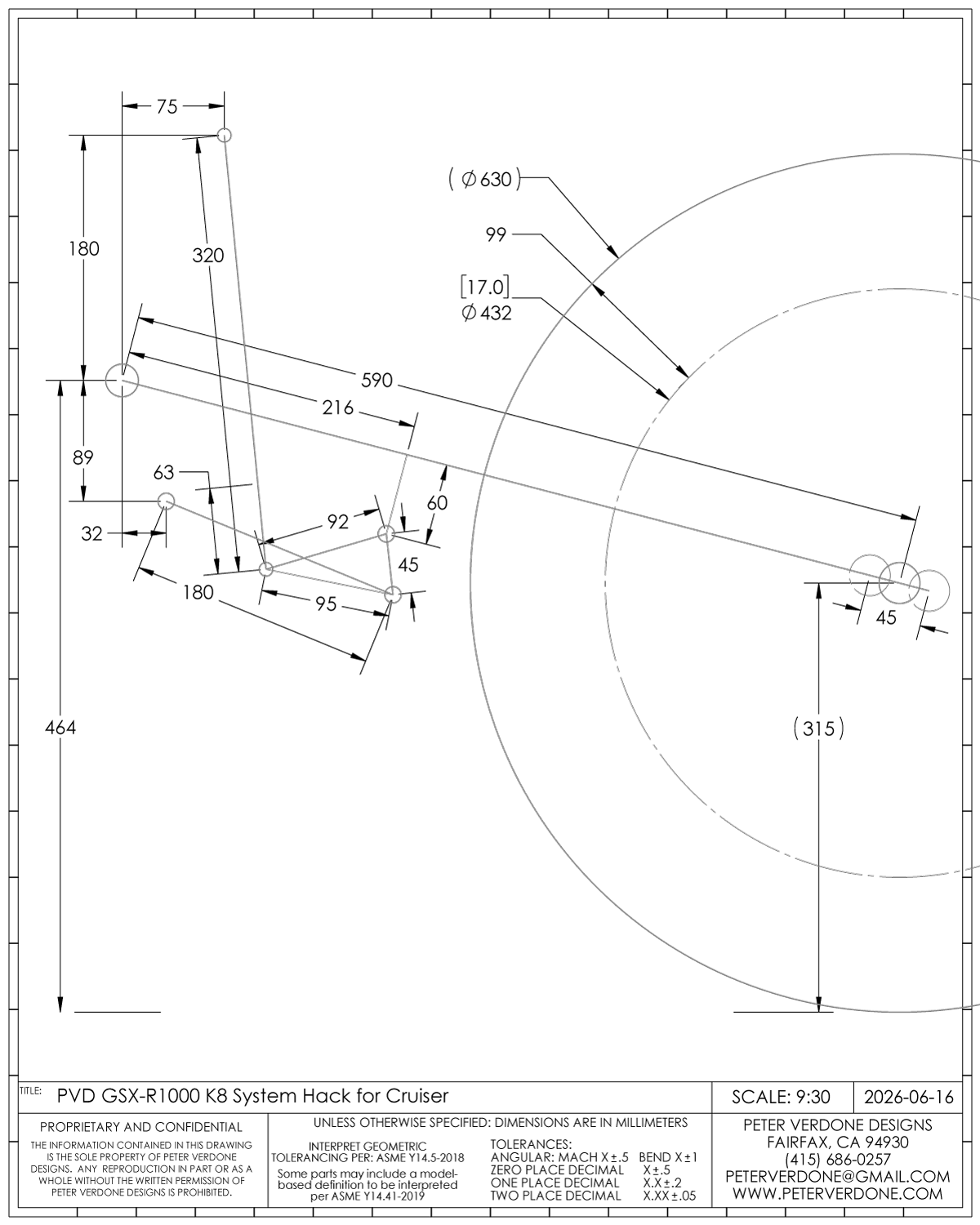
I modeled the parts of the system in CAD. Nothing too elaborate in detail but precise in measures. This would allow me to figure out the best locations for the swingarm pivot, dogbone pivot, and Shock pivot. I could go down two paths, a motion study or a calculator. I prefer calculators.
The math is similar to what I did for the Transition Smuggler in 2023. The shame about this method is that it goes from the wheel to the shock and I’d prefer the other way. That is hard. Let me know if you have a way.
Getting some valid parameters starts with the CAD sketch for extended and compressed situations. This proves that the locations I’ve chose work geometrically for the defined parameters. I’m moving some things around for space and increasing travel from 130mm to 140mm, so optimal fit is hard. I also don’t have a lot of influence on most of the system.
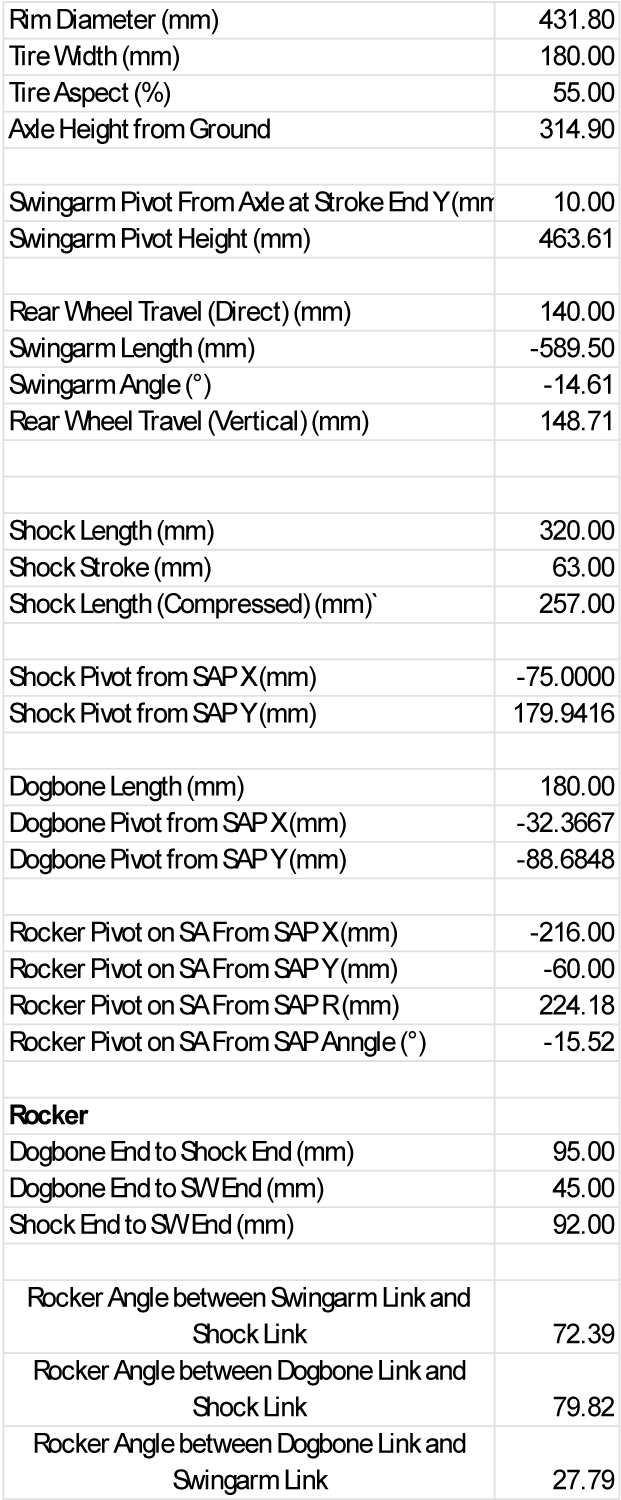
From here, I can enter them into the calculator. These are the driving parameters and a few fixed calculations.
So many steps to get to the end. This takes focus and time to figure out. I’m still cleaning all of this up. I wish I was better with math.
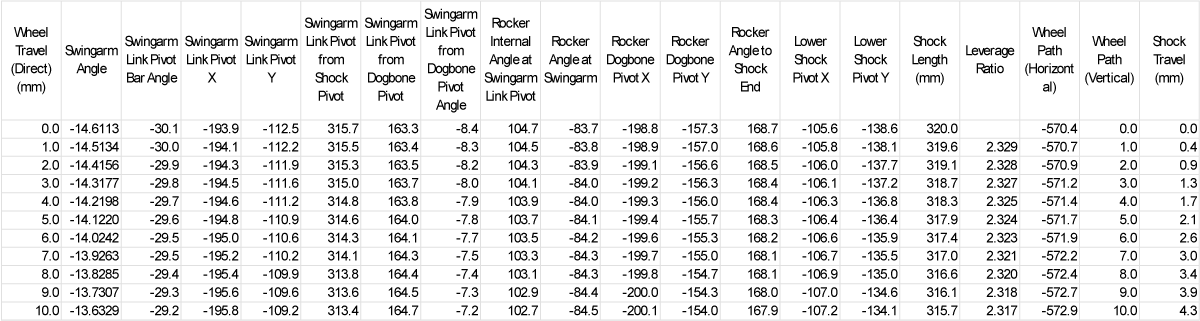
I can now get some visual understanding of the behaviors. The ‘curves’ as they say.
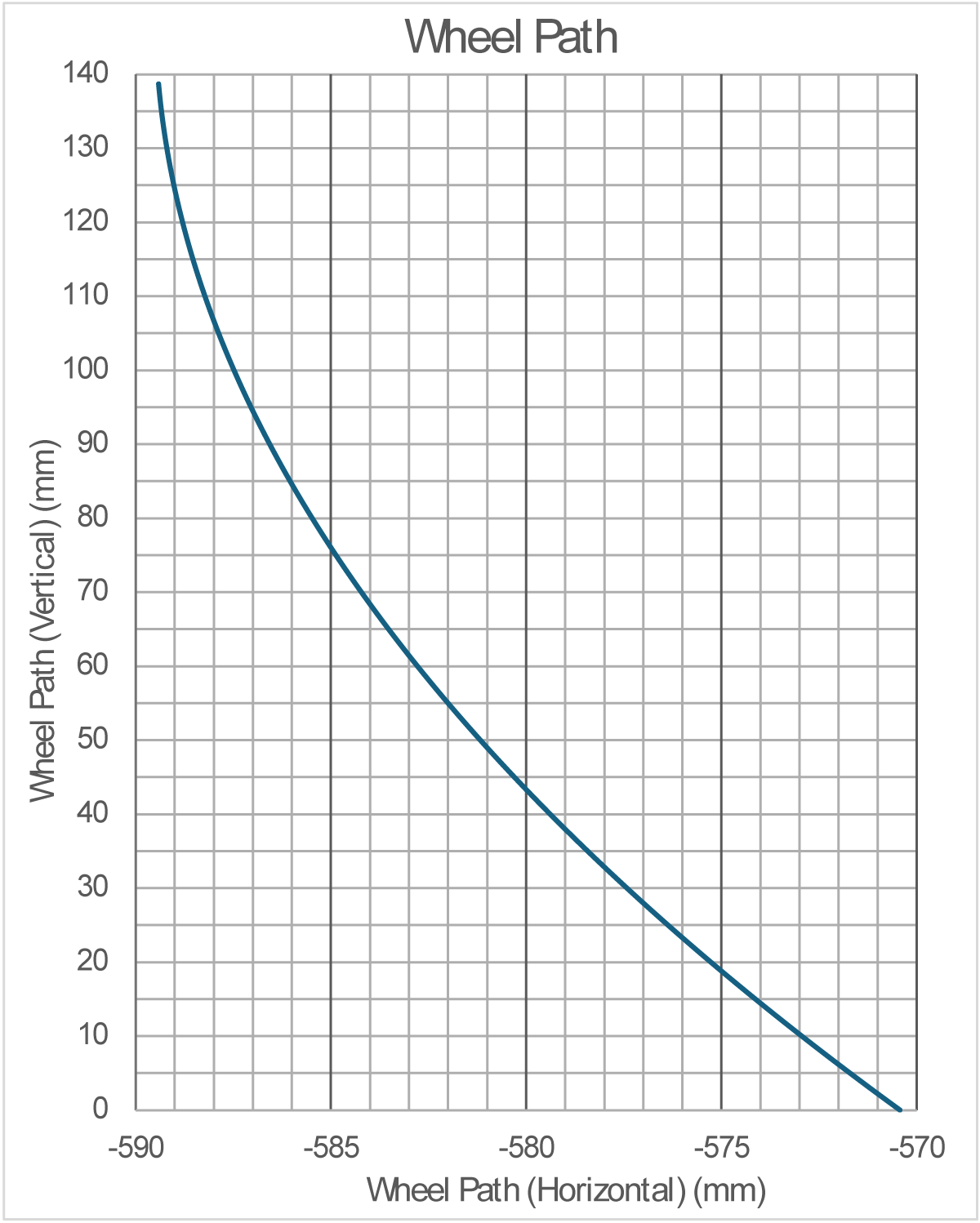
The wheel path. It climbs up and back but never forward. I had started with the end just tangent to vertical but decided to back away from that to smooth out momentum.
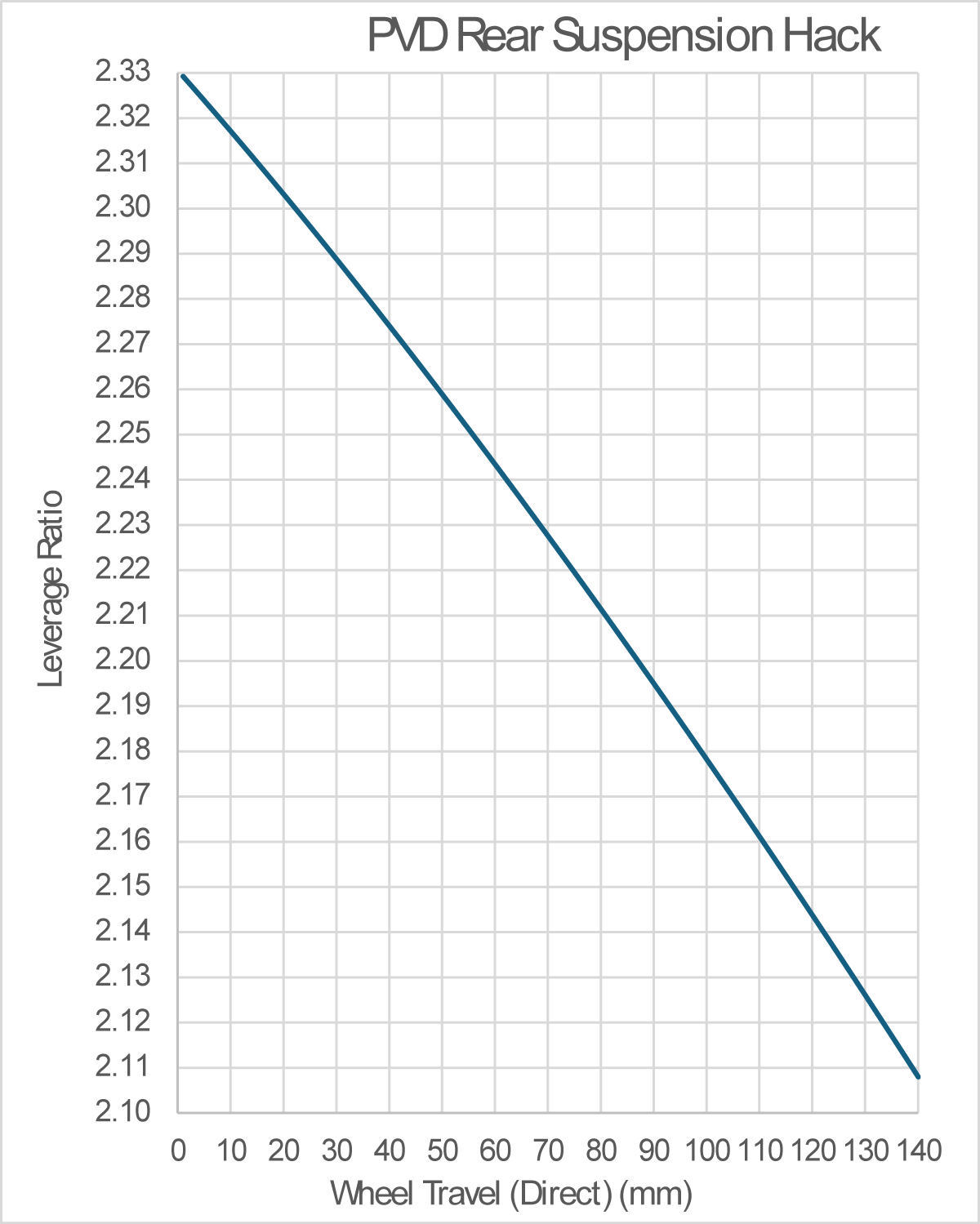
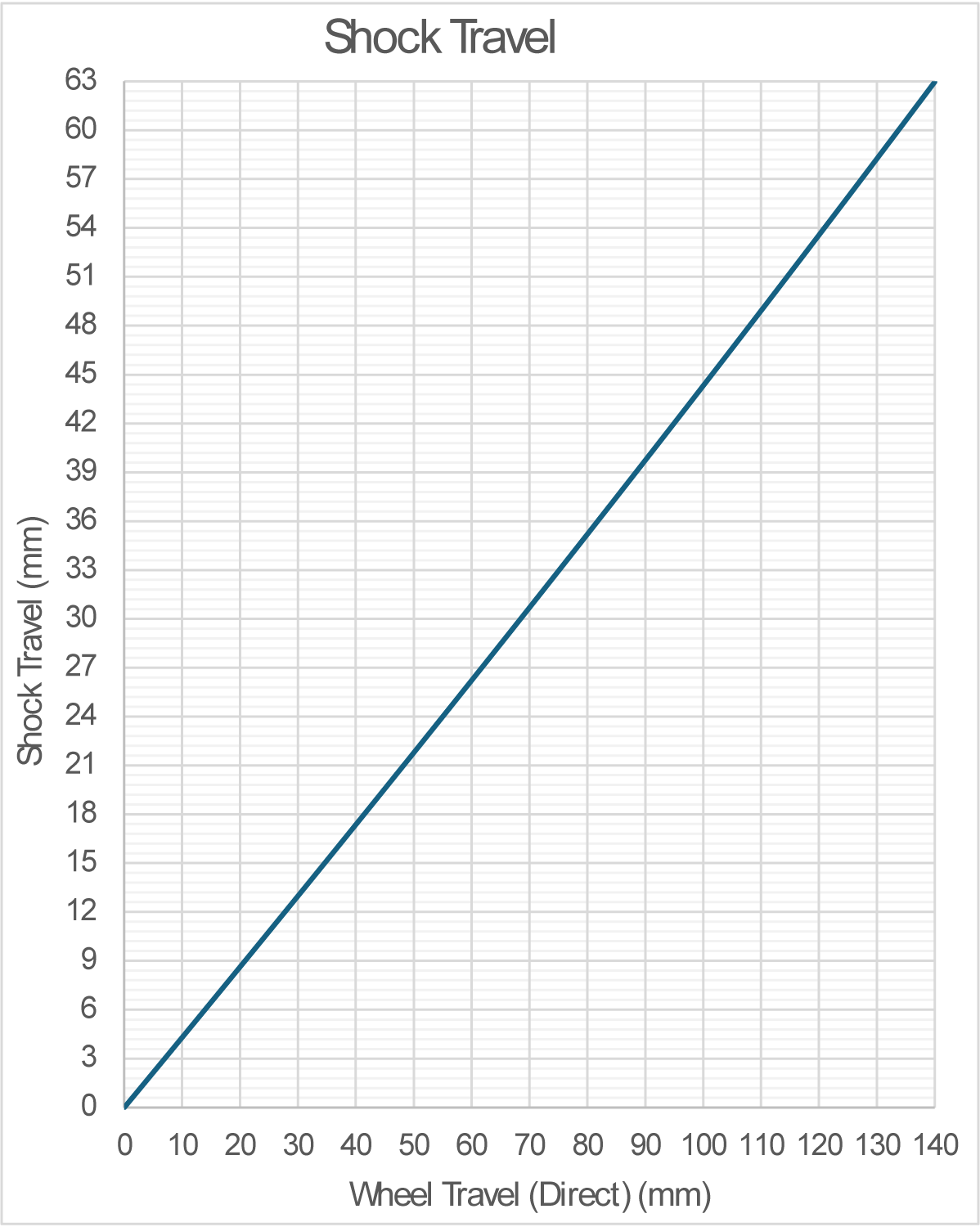
A simple plot of the shock to direct travel of the system. It’s always funny how straight that this looks compared to the leverage ratio but that’s to be expected. The leverage ratio curve plot is designed to make very small changes look big.
The leverage ratio. I want some progressivity in the action but not crazy. The bike should feel cozy and smooth with some margin of safety for bottoming when I’m on dirt roads and rallying hard. 2.33 to 2.11. Not linear but not super progressive. I should play with this more to try to get it to go from 2.3 to 2.0.